fxix a écrit:par contre j'imagine plutôt une utilisation de ce type :
* joystick pour la rotation de l'Apn (PAN ET Tilt)
* déclenchement par le gros bouton
ça c'est faisable "simplement".
Le seul problème est pratique (pas technique): Le joystick n'a pas de position fixe autre que le neutre, ça veut dire que le tilt ira vers le haut en mettant le joystick vers le haut (idem pour le bas evidemment)... il n'y aura pas de proportionnalité entre la position du stick et la position du tilt. Bon, c'est loin d'être catastrophique.
fxix a écrit:et en option :
* si on appui sur le petit bouton on peu utiliser directement les gyros pour déplacer l'APN.
Là, faut que tu expliques à quoi tu penses
fxix a écrit:peut on imaginer pour le moment une intreface nunchuck - radioclassique ou tout dois passer par un système arduino ?
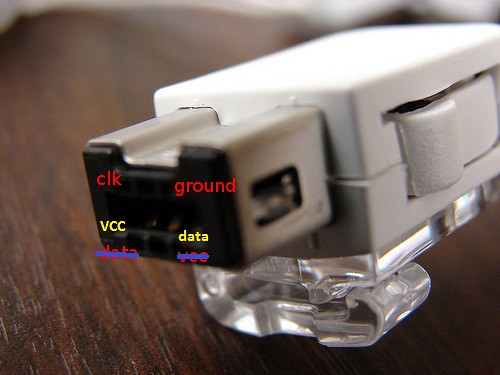
Brancher directement la manette sur la radiocommande classique, là, je dirais impossible. La sortie de la manette se fait en I2C, et à ma connaissance, les radios commandes ne gèrent pas ce type de signal.
Il serait par contre envisageable d'avoir la nunchuck branchée sur un arduino, puis l'arduino branché sur la prise écolage (ça éviterait d'ouvrir la radio)... mais quel serait l'intérêt d'avoir la télécommande classique (qui a ses joysticks) et une nunchuck reliée à cette radio ?
fxix a écrit:qu'est ce qu'il faut acheter maintenant pour aller plus loin et piloter la nacelle depuis le sol ?
Difficile à dire pour l'instant, ça va dépendre de la voie à suivre. Personnellement, je n'ai pas encore tout à fait défini ce que je veux faire (et j'en suis donc toujours à l'autokap aussi).
Je pense que ma config va ressembler à ça:
- J'oublie la liaison radio 41Mhz de ma radio commande classique, mais je garde le boitier pour ses joysticks. Je rajoute dessus un autre boitier dans lequel je mets un circuit imprimé avec un mini arduino, un modem 433Mhz et un récepteur vidéo 2.4Ghz.
- Ce même circuit imprimé (arduino, radio, vidéo) pourra être monté dans un autre boitier (beaucoup plus petit que la radio classique) à mettre dans une poche, avec cette fois la nunchuck branchée à la place du boitier de la radio classique
Ouais, pas très clair mon histoire, si ça interesse quelqu'un, je réexplique photos à l'appui
PS: pour l'instant, y'a rien qu'avance






{kind=link}