Bonjour à tous,
Il y a quelques temps, j'avais lancé l'idée d'utiliser arduino pour l'électronique de nos nacelles.
Certains d'entre vous sont d'ailleurs passés à l'acte avec visiblement un certain succès.
Une certaine surcharge au niveau boulot m'a tenue éloigné et d'arduino et du kap, à mon grand regret. Mais me revoila..
Vous trouverez ici http://code.google.com/p/ardukap/downloads/list une version alpha de mes travaux (pour l'instant n'est codée que la partie récepteur, mais je travaille sur l'émetteur), voila les librairies disponibles :
- KAP_Battery : permet de mesurer la tension des batterie via un diviseur de tension http://crteknologies.fr/electronique/cours/bases.php
- KAP_Altitude : permet de mesurer l'altitude via un capteur de pression BMP_085 http://www.lextronic.fr/P19202-platine-capteur-de-pression-barometrique.html
- KAP_Axle : une surcouche à la librairie servo qui permet de simplifier grandement la gestion des différents axes de notre nacelle
- KAP_Shutter : permet la gestion des déclencheurs, pour l'instant servo, chdk et ricoh ca-1
Pour configurer les différents axes de la nacelle il faut envoyer par le port série les ordres suivants :
SET INIT PAN {type} {pin} {min} {center} {max} {degree}
type vaut :
- NORMAL 1
- CONTINIOUS 2
Donc pour configurer un servo de pan sur le pin 9 en mode continu qui tourne lentement il faut envoyer l'ordre suivant :
SET INIT PAN 2 9 0 90 180 5
Voila c'est assez peu documenté, mais quelqu'un qui a déja mis le nez dans un arduino doit pouvoir s'y retrouver car j'ai volontairement fait un code très lisible.
Bonne lecture
PS: le code est également disponible en lecture ici :
http://code.google.com/p/ardukap/source/browse/#svn%2Ftrunk
http://photocerfvolant.free.fr
Le forum francophone d'échange sur la photo aérienne par cerf-volant.
arduKap : kapduino le retour
57 messages • Page 1 sur 2 • 1, 2
arduKap : kapduino le retour
![]() de deldude le Mer 22 Juin 2011, 6:48
de deldude le Mer 22 Juin 2011, 6:48
Bon vols et belles Photos
Jean-Christophe
Jean-Christophe
-

deldude - Plus de 100 messages
- Messages: 157
- Inscription: Ven 23 Juin 2006, 14:59
- Localisation: Maisons-Alfort
Re: arduKap : kapduino le retour
![]() de deldude le Mer 22 Juin 2011, 9:52
de deldude le Mer 22 Juin 2011, 9:52
Petit complément sur le matériel utilisé sur la partie récepteur :
- capteur de pression http://www.lextronic.fr/P19202-platine-capteur-de-pression-barometrique.html 18.50 €
- modules sans fil http://www.sureelectronics.net/goods.php?id=1053l $29.90
- arduino pro mini http://www.lextronic.fr/P4129-platine-arduino-pro-mini---33-v--8-mhz.html 17.05 €
Sur la partie émetteur :
- arduino pro mini http://www.lextronic.fr/P4129-platine-arduino-pro-mini---33-v--8-mhz.html 17.05 €
- modules sans fil http://www.sureelectronics.net/goods.php?id=1053l $29.90
- joystick http://www.lextronic.fr/P4804-mini-joystick-xy.html et http://www.lextronic.fr/P5723-platine-support-pour-mini-joystick.html 5.35 €
- encodeur rotatif http://www.sureelectronics.net/goods.php?id=221 $8.50
- lcd http://www.lextronic.fr/P19989-platine-afficheur-lcd-graphique-monochrome.html 9.45 €
Il faut également rajouter quelques résistances, une plaque d'essai, des connecteurs pour les batterie et des interrupteurs. Et également un de quoi programmer l'arduino http://www.lextronic.fr/P4160-module-ftdi-basic-breakout---33v.html 12.93 €
Soit un budget d'une centaine d'euros pour quelqu'un qui doit tout acheter..
A+
- capteur de pression http://www.lextronic.fr/P19202-platine-capteur-de-pression-barometrique.html 18.50 €
- modules sans fil http://www.sureelectronics.net/goods.php?id=1053l $29.90
- arduino pro mini http://www.lextronic.fr/P4129-platine-arduino-pro-mini---33-v--8-mhz.html 17.05 €
Sur la partie émetteur :
- arduino pro mini http://www.lextronic.fr/P4129-platine-arduino-pro-mini---33-v--8-mhz.html 17.05 €
- modules sans fil http://www.sureelectronics.net/goods.php?id=1053l $29.90
- joystick http://www.lextronic.fr/P4804-mini-joystick-xy.html et http://www.lextronic.fr/P5723-platine-support-pour-mini-joystick.html 5.35 €
- encodeur rotatif http://www.sureelectronics.net/goods.php?id=221 $8.50
- lcd http://www.lextronic.fr/P19989-platine-afficheur-lcd-graphique-monochrome.html 9.45 €
Il faut également rajouter quelques résistances, une plaque d'essai, des connecteurs pour les batterie et des interrupteurs. Et également un de quoi programmer l'arduino http://www.lextronic.fr/P4160-module-ftdi-basic-breakout---33v.html 12.93 €
Soit un budget d'une centaine d'euros pour quelqu'un qui doit tout acheter..
A+
Bon vols et belles Photos
Jean-Christophe
Jean-Christophe
-
deldude - Plus de 100 messages
- Messages: 157
- Inscription: Ven 23 Juin 2006, 14:59
- Localisation: Maisons-Alfort
Re: arduKap : kapduino le retour
![]() de alpaph le Mer 22 Juin 2011, 17:01
de alpaph le Mer 22 Juin 2011, 17:01
Bonjour,
Merci pour ces informations.
Ton post arrive à point nommé, juste au moment où j'étais en cours de mettre au point la commande du servo 360°. Je pense donc regarder de près la librairie ad hoc.
Je vois que tu prévois d'utiliser un afficheur, j'imagine pour l'affichage d'informations issues de tes capteurs. L'utiliseras-tu aussi pour paramétrer ton système ?
Pour ma part, j'envisage de le faire avec un accès à des menus via un joystick. As-tu aussi ce projet ?
A+
Merci pour ces informations.
Ton post arrive à point nommé, juste au moment où j'étais en cours de mettre au point la commande du servo 360°. Je pense donc regarder de près la librairie ad hoc.
Je vois que tu prévois d'utiliser un afficheur, j'imagine pour l'affichage d'informations issues de tes capteurs. L'utiliseras-tu aussi pour paramétrer ton système ?
Pour ma part, j'envisage de le faire avec un accès à des menus via un joystick. As-tu aussi ce projet ?
A+
A+
Philippe
Site perso : http://alpaph.free.fr - Galerie Flickr : http://www.flickr.com/photos/41085895@N08/
Philippe
Site perso : http://alpaph.free.fr - Galerie Flickr : http://www.flickr.com/photos/41085895@N08/
-

alpaph - Plus de 100 messages
- Messages: 312
- Inscription: Dim 22 Mars 2009, 19:24
- Localisation: Seine-saint-denis
Re: arduKap : kapduino le retour
![]() de deldude le Mer 22 Juin 2011, 17:15
de deldude le Mer 22 Juin 2011, 17:15
Tout à fait ce petit écran nokia de 84x48 pixel est pas cher et très facile à interfacer, je compte bien m'en servir pour un système de menu 
Bon vols et belles Photos
Jean-Christophe
Jean-Christophe
-
deldude - Plus de 100 messages
- Messages: 157
- Inscription: Ven 23 Juin 2006, 14:59
- Localisation: Maisons-Alfort
Re: arduKap : kapduino le retour
![]() de Jeff06 le Mer 22 Juin 2011, 18:55
de Jeff06 le Mer 22 Juin 2011, 18:55
Bonjour.
C'est passionnant, mais ... quand on n'y connait rien en électronique ?
Prévoyez-vous un petit guide "pas à pas", avec liste du matériel, schémas, et programmes ?
Ce serait une vraie aide !
Jeff.
C'est passionnant, mais ... quand on n'y connait rien en électronique ?
Prévoyez-vous un petit guide "pas à pas", avec liste du matériel, schémas, et programmes ?
Ce serait une vraie aide !
Jeff.
- Jeff06
- Plus de 100 messages
- Messages: 107
- Inscription: Mar 19 Avril 2011, 21:21
- Localisation: PACA
Re: arduKap : kapduino le retour
![]() de deldude le Mer 22 Juin 2011, 20:44
de deldude le Mer 22 Juin 2011, 20:44
Jeff06 a écrit:Bonjour.
C'est passionnant, mais ... quand on n'y connait rien en électronique ?
Prévoyez-vous un petit guide "pas à pas", avec liste du matériel, schémas, et programmes ?
Ce serait une vraie aide !
Jeff.
Je veux bien essayer de mettre tout ça au clair mais la pédagogie n'est pas mon point fort
Par contre la partie purement matérielle est assez facile à mettre en oeuvre, c'est l'avantage.
A+
Bon vols et belles Photos
Jean-Christophe
Jean-Christophe
-
deldude - Plus de 100 messages
- Messages: 157
- Inscription: Ven 23 Juin 2006, 14:59
- Localisation: Maisons-Alfort
Re: arduKap : kapduino le retour
![]() de deldude le Mer 22 Juin 2011, 20:45
de deldude le Mer 22 Juin 2011, 20:45
alpaph a écrit:Pour ma part, j'envisage de le faire avec un accès à des menus via un joystick. As-tu aussi ce projet ?
A+
Par contre le soucis des joystick c'est que c'est assez imposant donc ça implique une télécommande assez épaisse..
Bon vols et belles Photos
Jean-Christophe
Jean-Christophe
-
deldude - Plus de 100 messages
- Messages: 157
- Inscription: Ven 23 Juin 2006, 14:59
- Localisation: Maisons-Alfort
Re: arduKap : kapduino le retour
![]() de alpaph le Mer 22 Juin 2011, 21:26
de alpaph le Mer 22 Juin 2011, 21:26
Perso, j'aime bien la pédagogie, même si ce n'est pas mon métier. Par contre, il faut du temps. Et comme le dit Deldude, la partie matérielle n'est pas très compliquée. Après, on a tout le loisir de tâtonner, d'expérimenter et de chercher sur Internet.

Ce qui m'embête le plus, c'est le développement du menu : j'ai repéré quelques librairies ... à voir.
Coté servo, je trouve ta librairie très bien et très complète : je vais certainement l'utiliser (ce sera plus propre pour mon code). Par contre, le contrôle d'un servo 360 est plus délicat, notamment pour le caler sur une position 0. De plus, on ne peut plus le manoeuvrer via "une commande angulaire" mais en contrôlant sa vitesse et sa durée de rotation. As-tu une idée sur la question ?
Pour ma part, j'ai fait un bricolage (c'est vraiment le terme) en positionnant une "sorte de poussoir "qui permet de caler une position 0 au servo. L'avantage, c'est que ça marche, c'est léger mais j'aurai préféré quelque chose de plus sympa.
Je ne me rends pas compte de l'épaisseur de ce type de matériel. Voici celui que je vise (http://www.lextronic.fr/P19782-platine-4display-shield-96.html). Je n'ai pas l'impression qu'il soit très épais. Il est vraiment plus cher que celui que tu envisages, mais bon, il a la couleur et il consomme plusdeldude a écrit:Par contre le soucis des joystick c'est que c'est assez imposant donc ça implique une télécommande assez épaisse..
Ce qui m'embête le plus, c'est le développement du menu : j'ai repéré quelques librairies ... à voir.
Coté servo, je trouve ta librairie très bien et très complète : je vais certainement l'utiliser (ce sera plus propre pour mon code). Par contre, le contrôle d'un servo 360 est plus délicat, notamment pour le caler sur une position 0. De plus, on ne peut plus le manoeuvrer via "une commande angulaire" mais en contrôlant sa vitesse et sa durée de rotation. As-tu une idée sur la question ?
Pour ma part, j'ai fait un bricolage (c'est vraiment le terme) en positionnant une "sorte de poussoir "qui permet de caler une position 0 au servo. L'avantage, c'est que ça marche, c'est léger mais j'aurai préféré quelque chose de plus sympa.
A+
Philippe
Site perso : http://alpaph.free.fr - Galerie Flickr : http://www.flickr.com/photos/41085895@N08/
Philippe
Site perso : http://alpaph.free.fr - Galerie Flickr : http://www.flickr.com/photos/41085895@N08/
-
alpaph - Plus de 100 messages
- Messages: 312
- Inscription: Dim 22 Mars 2009, 19:24
- Localisation: Seine-saint-denis
Re: arduKap : kapduino le retour
![]() de hansel le Mer 22 Juin 2011, 21:27
de hansel le Mer 22 Juin 2011, 21:27
Salut Jean-Christophe (et tous),
Moi aussi je vais moderniser ma nacelle avec un Arduino (après les vacances )...
C'est incroyable: je viens de découvrir les modules radio que tu mentionnes cet après-midi!. C'est vraiment bien (portée et consommation de courant en mode réception). J’hésite encore un peu avec les modules Xbee comme alternatif. L'avantage des modules 470MHz c'est qu'ils ne dérangent pas le retour vidéo 2.4GHz... Les Xbee 900Mhz sont bien aussi (ont des entrees et sorties analogues et digitaux), mais plus chers...
Tient nous au courant!
Amities, Hans
PS: Je compte utiliser mon servo 360 (pas modifié!) comme ça je n'ai pas besoin de mesurer l'angle 'pan'
PS2: Ici les modules sont livrés avec un interface PC (c'est bien pour tester)
Moi aussi je vais moderniser ma nacelle avec un Arduino (après les vacances )...
C'est incroyable: je viens de découvrir les modules radio que tu mentionnes cet après-midi!. C'est vraiment bien (portée et consommation de courant en mode réception). J’hésite encore un peu avec les modules Xbee comme alternatif. L'avantage des modules 470MHz c'est qu'ils ne dérangent pas le retour vidéo 2.4GHz... Les Xbee 900Mhz sont bien aussi (ont des entrees et sorties analogues et digitaux), mais plus chers...
Tient nous au courant!
Amities, Hans
PS: Je compte utiliser mon servo 360 (pas modifié!) comme ça je n'ai pas besoin de mesurer l'angle 'pan'
PS2: Ici les modules sont livrés avec un interface PC (c'est bien pour tester)
Hans Elbers,
Site: http://www.fotovlieger.nl
Flickr: http://www.flickr.com/photos/hanselpedia/
Facebook: https://www.facebook.com/fotovlieger
Site: http://www.fotovlieger.nl
Flickr: http://www.flickr.com/photos/hanselpedia/
Facebook: https://www.facebook.com/fotovlieger
-

hansel - Plus de 400 messages
- Messages: 420
- Inscription: Ven 07 Mai 2010, 16:58
- Localisation: rotterdam,nl
Re: arduKap : kapduino le retour
![]() de alpaph le Mer 22 Juin 2011, 21:32
de alpaph le Mer 22 Juin 2011, 21:32
alpaph a écrit:PS: Je compte utiliser mon servo 360 (pas modifié!) comme ça je n'ai pas besoin de mesurer l'angle 'pan'
Il y a un sujet là dessus car ça m'intéresse ? c'est quand même plus facile à piloter !
A+
A+
Philippe
Site perso : http://alpaph.free.fr - Galerie Flickr : http://www.flickr.com/photos/41085895@N08/
Philippe
Site perso : http://alpaph.free.fr - Galerie Flickr : http://www.flickr.com/photos/41085895@N08/
-
alpaph - Plus de 100 messages
- Messages: 312
- Inscription: Dim 22 Mars 2009, 19:24
- Localisation: Seine-saint-denis
Re: arduKap : kapduino le retour
![]() de hansel le Mer 22 Juin 2011, 21:49
de hansel le Mer 22 Juin 2011, 21:49
alpaph a écrit:alpaph a écrit:PS: Je compte utiliser mon servo 360 (pas modifié!) comme ça je n'ai pas besoin de mesurer l'angle 'pan'
Il y a un sujet là dessus car ça m'intéresse ? c'est quand même plus facile à piloter !
Le servo que j'utilise est un GWS S125 1T
EDIT: C'est un servo 'normal', donc pas 'rotation continue', donc positionnement exact!
Dernière édition par hansel le Jeu 23 Juin 2011, 8:26, édité 5 fois.
Hans Elbers,
Site: http://www.fotovlieger.nl
Flickr: http://www.flickr.com/photos/hanselpedia/
Facebook: https://www.facebook.com/fotovlieger
Site: http://www.fotovlieger.nl
Flickr: http://www.flickr.com/photos/hanselpedia/
Facebook: https://www.facebook.com/fotovlieger
-
hansel - Plus de 400 messages
- Messages: 420
- Inscription: Ven 07 Mai 2010, 16:58
- Localisation: rotterdam,nl
Re: arduKap : kapduino le retour
![]() de deldude le Mer 22 Juin 2011, 22:19
de deldude le Mer 22 Juin 2011, 22:19
alpaph a écrit:Coté servo, je trouve ta librairie très bien et très complète : je vais certainement l'utiliser (ce sera plus propre pour mon code). Par contre, le contrôle d'un servo 360 est plus délicat, notamment pour le caler sur une position 0. De plus, on ne peut plus le manoeuvrer via "une commande angulaire" mais en contrôlant sa vitesse et sa durée de rotation. As-tu une idée sur la question ?
Voila comment je gère les servos :
- Code: Tout sélectionner
if(Type == CONTINIOUS)
{
Angle = Center + move;
}
myservo.write(Angle);
delay(15);
if(Type == CONTINIOUS)
{
reset();
}
Je dit au servo de se décaler de N degree d'un coté ou de l'autre du centre : plus N est élevé plus le servo tourne vite..
puis je le ramène au neutre avec la commande reset, bien sur le delay est à affiner (je vous avais prévenu que c'était du code alpha
maintenant pour les servos un peu recalcitrant au niveau du centre on peut utiliser la commande :
- Code: Tout sélectionner
myservo.writeMicroseconds(1500);
qui est nettement plus précise..
J'implémenterais ça avant la fin de la semaine c'est pas trop compliqué
Si la valeur center dans l'init est supérieure à 1000 dans ce cas j'utiliserai myservo.writeMicroseconds(1500); à la place de myservo.write(90);
Bon vols et belles Photos
Jean-Christophe
Jean-Christophe
-
deldude - Plus de 100 messages
- Messages: 157
- Inscription: Ven 23 Juin 2006, 14:59
- Localisation: Maisons-Alfort
Re: arduKap : kapduino le retour
![]() de deldude le Jeu 23 Juin 2011, 6:26
de deldude le Jeu 23 Juin 2011, 6:26
alpaph a écrit:Voici celui que je vise (http://www.lextronic.fr/P19782-platine-4display-shield-96.html). Je n'ai pas l'impression qu'il soit très épais. Il est vraiment plus cher que celui que tu envisages, mais bon, il a la couleur et il consomme plus
Ce qui m'embête le plus, c'est le développement du menu : j'ai repéré quelques librairies ... à voir.
Le principal soucis de cet écran (sans parler de son prix) c'est que il se commande par le port série et le port série on en a besoin si on veut utiliser des modules sans fil simples et peu onéreux. Si tu veux vraiment de la couleur utilise plutôt ça http://www.adafruit.com/products/358 qui se cable comme le nokia 3310.
Pour le joystick tu a plusieurs solution :
- un trackball http://www.sparkfun.com/products/9320
- un joystick basé sur des potentiometres http://www.sparkfun.com/products/9032
- un tout petit joystick http://www.sparkfun.com/products/9426 mais il faut rajouter un bouton
Dernière édition par deldude le Jeu 23 Juin 2011, 11:53, édité 1 fois.
Bon vols et belles Photos
Jean-Christophe
Jean-Christophe
-
deldude - Plus de 100 messages
- Messages: 157
- Inscription: Ven 23 Juin 2006, 14:59
- Localisation: Maisons-Alfort
Re: arduKap : kapduino le retour
![]() de J-C le Jeu 23 Juin 2011, 6:55
de J-C le Jeu 23 Juin 2011, 6:55
Ouah le retour de l'Arduino... génial! Je n'ai pas eu le temps de regarder encore ton boulot mais c'est prometteur. Perso, je n'ai pas réussi à faire fonctionner les modules de transmission que tu cites avec la librairie Servo (à cause du Timer1 il me semble me souvenir).
Mais bon, dès que j'aurais remis la main sur mon matériel, je me ferai un plaisir de collaborer à hauteur de mes possibilités.
A+
JC
PS: en ce moment je suis plus accaparé par du "gros bricolage de maison" que par du petit bricolage d'atelier... Ceci étant, l'aspect pédago, je dois pouvoir y arriver.
Mais bon, dès que j'aurais remis la main sur mon matériel, je me ferai un plaisir de collaborer à hauteur de mes possibilités.
A+
JC
PS: en ce moment je suis plus accaparé par du "gros bricolage de maison" que par du petit bricolage d'atelier... Ceci étant, l'aspect pédago, je dois pouvoir y arriver.
-

J-C - Plus de 1000 messages
- Messages: 1770
- Inscription: Jeu 15 Mai 2008, 9:14
- Localisation: Sud des Landes
Re: arduKap : kapduino le retour
![]() de André le Jeu 23 Juin 2011, 12:11
de André le Jeu 23 Juin 2011, 12:11
hansel a écrit:alpaph a écrit:alpaph a écrit:Le servo que j'utilise est un GWS S125 1T
EDIT: C'est un servo 'normal', donc pas 'rotation continue', donc positionnement exact!
Et tu arrives à le faire tourner sur 360° ?
Parce que j'en ai un mais je n'arrive pas à lui faire faire un tour complet.
Du coup, j'en ai un qui devrait faire 3 tours, réduit à 1.5 tour par pignons et encore un peu avec la radio.
André
Ma galerie flickr : http://www.flickr.com/photos/dd-29/
Mon blog : http://kapouest.over-blog.com/
ou : http://kap-ouest.eklablog.com/
Ma galerie flickr : http://www.flickr.com/photos/dd-29/
Mon blog : http://kapouest.over-blog.com/
ou : http://kap-ouest.eklablog.com/
-

André - Plus de 8000 messages
- Messages: 9269
- Inscription: Dim 21 Septembre 2008, 17:02
- Localisation: Au nord de Brest même
Re: arduKap : kapduino le retour
![]() de hansel le Jeu 23 Juin 2011, 16:32
de hansel le Jeu 23 Juin 2011, 16:32
André a écrit:hansel a écrit:Le servo que j'utilise est un GWS S125 1T
EDIT: C'est un servo 'normal', donc pas 'rotation continue', donc positionnement exact!
Et tu arrives à le faire tourner sur 360° ?
Parce que j'en ai un mais je n'arrive pas à lui faire faire un tour complet.
Du coup, j'en ai un qui devrait faire 3 tours, réduit à 1.5 tour par pignons et encore un peu avec la radio.
Oui, mais ça dépend peut-être de la radio... J'arrive aussi a faire tourner mon servo tilt (un servo normal) sur 180°
Hans Elbers,
Site: http://www.fotovlieger.nl
Flickr: http://www.flickr.com/photos/hanselpedia/
Facebook: https://www.facebook.com/fotovlieger
Site: http://www.fotovlieger.nl
Flickr: http://www.flickr.com/photos/hanselpedia/
Facebook: https://www.facebook.com/fotovlieger
-
hansel - Plus de 400 messages
- Messages: 420
- Inscription: Ven 07 Mai 2010, 16:58
- Localisation: rotterdam,nl
Re: arduKap : kapduino le retour
![]() de alpaph le Jeu 23 Juin 2011, 18:20
de alpaph le Jeu 23 Juin 2011, 18:20
deldude a écrit:c'est que il se commande par le port série et le port série on en a besoin si on veut utiliser des modules sans fil simples et peu onéreux.
Avec la librairie NewSoftSerial, tu peux déclarer des ports séries sur plusieurs PIN. Du coup, ça te libère de certaines contraintes matérielles.
J-C a écrit:(à cause du Timer1 il me semble me souvenir)
Pour ma part, j'ai des problèmes de fonctionnement avec ce Timer sur mon Arduino mini (je ne sais pas si cela a un lien avec le matériel, il n'y a pas de raison et la solution est certainement dans le code).
Par contre, j'ai mis en oeuvre la librairie Metro qui permet d'instancier plusieurs "temporisation". Interessant et facile !
A+
A+
Philippe
Site perso : http://alpaph.free.fr - Galerie Flickr : http://www.flickr.com/photos/41085895@N08/
Philippe
Site perso : http://alpaph.free.fr - Galerie Flickr : http://www.flickr.com/photos/41085895@N08/
-
alpaph - Plus de 100 messages
- Messages: 312
- Inscription: Dim 22 Mars 2009, 19:24
- Localisation: Seine-saint-denis
Re: arduKap : kapduino le retour
![]() de André le Jeu 23 Juin 2011, 19:44
de André le Jeu 23 Juin 2011, 19:44
hansel a écrit:Oui, mais ça dépend peut-être de la radio... J'arrive aussi a faire tourner mon servo tilt (un servo normal) sur 180°
Qu'est-ce que tu utilises comme radio Hans ?
André
Ma galerie flickr : http://www.flickr.com/photos/dd-29/
Mon blog : http://kapouest.over-blog.com/
ou : http://kap-ouest.eklablog.com/
Ma galerie flickr : http://www.flickr.com/photos/dd-29/
Mon blog : http://kapouest.over-blog.com/
ou : http://kap-ouest.eklablog.com/
-
André - Plus de 8000 messages
- Messages: 9269
- Inscription: Dim 21 Septembre 2008, 17:02
- Localisation: Au nord de Brest même
Re: arduKap : kapduino le retour
![]() de hansel le Ven 24 Juin 2011, 14:27
de hansel le Ven 24 Juin 2011, 14:27
André a écrit:hansel a écrit:Oui, mais ça dépend peut-être de la radio... J'arrive aussi a faire tourner mon servo tilt (un servo normal) sur 180°
Qu'est-ce que tu utilises comme radio Hans ?
Excuse moi, je me suis trompé. Le servo tilt tourne environ 135 deg.
Ma radio c’est une Hitec 4 laser 4.
Pour atteindre les angles max. je suis obligé d'utiliser le manche de commande et le 'slider reglage fin' .
Hans Elbers,
Site: http://www.fotovlieger.nl
Flickr: http://www.flickr.com/photos/hanselpedia/
Facebook: https://www.facebook.com/fotovlieger
Site: http://www.fotovlieger.nl
Flickr: http://www.flickr.com/photos/hanselpedia/
Facebook: https://www.facebook.com/fotovlieger
-
hansel - Plus de 400 messages
- Messages: 420
- Inscription: Ven 07 Mai 2010, 16:58
- Localisation: rotterdam,nl
Re: arduKap : kapduino le retour
![]() de fxix le Lun 27 Juin 2011, 14:09
de fxix le Lun 27 Juin 2011, 14:09
Encore un fil que je vais suivre de près. En plus j'ai déjà un peu de matériel à la maison 
-

fxix - Plus de 1000 messages
- Messages: 1038
- Inscription: Dim 13 Avril 2008, 9:00
- Localisation: presque à Tours
Re: arduKap : kapduino le retour
![]() de fxix le Lun 27 Juin 2011, 14:16
de fxix le Lun 27 Juin 2011, 14:16
Jeff06 a écrit:Bonjour.
C'est passionnant, mais ... quand on n'y connait rien en électronique ?
Prévoyez-vous un petit guide "pas à pas", avec liste du matériel, schémas, et programmes ?
Ce serait une vraie aide !
Jeff.
Salut Jeff,
Tu peux faire une recherche dans ce Forum avec "Kapduino" et tu devrais trouver de nombreux posts traitant du sujet (je posais les mêmes questions il y a quelques mois)
-
fxix - Plus de 1000 messages
- Messages: 1038
- Inscription: Dim 13 Avril 2008, 9:00
- Localisation: presque à Tours
Re: arduKap : kapduino le retour
![]() de fredo5962 le Lun 27 Juin 2011, 21:01
de fredo5962 le Lun 27 Juin 2011, 21:01
Bonsoir,
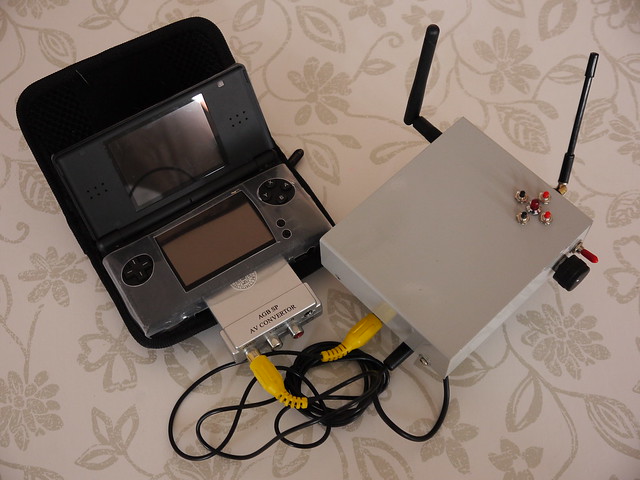
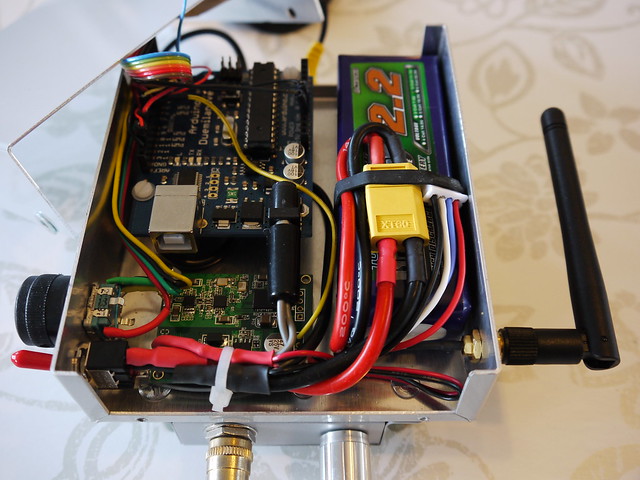
Ci-dessous, un autre exemple d'émetteur 2.4 GHz à base d'Arduino (fortement inspiré du Forum) destiné à commander une nacelle + CANON S90.
Les fonctions principales :
- Gestion des boutons poussoirs (Zoom In, Zoom Out, mode PAN/TILT, etc...) + LED + Buzzer,
- Gestion de l'encodeur (par interruption) pour le PAN et TILT,
- Génération Trame PPM (par interruption) envoyée sur un émetteur du commerce (la carte verte en bas à gauche de la dernière photo).
Et un retour vidéo composé d'un récepteur "classique" et d'un écran NINTENDO DS + adaptateur.
L'ensemble tourne depuis Novembre 2010 et me donne entière satisfaction
Le tout est alimenté par un accu LIPO 3S 2200 mAH offrant une autonomie de plusieurs heures...

Ci-dessous, un autre exemple d'émetteur 2.4 GHz à base d'Arduino (fortement inspiré du Forum) destiné à commander une nacelle + CANON S90.
Les fonctions principales :
- Gestion des boutons poussoirs (Zoom In, Zoom Out, mode PAN/TILT, etc...) + LED + Buzzer,
- Gestion de l'encodeur (par interruption) pour le PAN et TILT,
- Génération Trame PPM (par interruption) envoyée sur un émetteur du commerce (la carte verte en bas à gauche de la dernière photo).
Et un retour vidéo composé d'un récepteur "classique" et d'un écran NINTENDO DS + adaptateur.
L'ensemble tourne depuis Novembre 2010 et me donne entière satisfaction
Le tout est alimenté par un accu LIPO 3S 2200 mAH offrant une autonomie de plusieurs heures...
Frédéric
Site : http://fred.thorigny.pagesperso-orange.fr/
Galerie Flickr : http://www.flickr.com/photos/thorigny_frederic/
Site : http://fred.thorigny.pagesperso-orange.fr/
Galerie Flickr : http://www.flickr.com/photos/thorigny_frederic/
-

fredo5962 - Plus de 100 messages
- Messages: 153
- Inscription: Ven 03 Novembre 2006, 21:35
- Localisation: FERIN à proximité de DOUAI
Re: arduKap : kapduino le retour
![]() de J-C le Mar 28 Juin 2011, 7:52
de J-C le Mar 28 Juin 2011, 7:52
Est-ce que tu pourrais indiquer le matériel de transmission utilisé avec l'arduino et le code ? Ceci étant, tu n'utilises pas l'arduino en réception sur la nacelle (ou alors ce n'est pas indiqué).
Toujours est-il que je suis intéressé par tes infos.
Merci de stimuler les neurones.
A+
JC
Toujours est-il que je suis intéressé par tes infos.
Merci de stimuler les neurones.
A+
JC
-
J-C - Plus de 1000 messages
- Messages: 1770
- Inscription: Jeu 15 Mai 2008, 9:14
- Localisation: Sud des Landes
Re: arduKap : kapduino le retour
![]() de fredo5962 le Mar 28 Juin 2011, 21:24
de fredo5962 le Mar 28 Juin 2011, 21:24
Bonsoir,
La carte émetteur est un MODULE V8HT ACCST 2.4GHZ trouvé sur http://www.intermodel.fr/product.php?id_product=860
Et pour le soft, c'est ici : http://fred.thorigny.pagesperso-orange.fr/HTML/fichiers/Encodeur_INT_PPM_07.pde
Sinon, je travaille sur une version bcp plus évoluée équipée d'un clavier tactile, d'un émetteur type MODULE DHT TELEMETRIE et afficheur LCD.
A suivre donc...
A+
La carte émetteur est un MODULE V8HT ACCST 2.4GHZ trouvé sur http://www.intermodel.fr/product.php?id_product=860
Et pour le soft, c'est ici : http://fred.thorigny.pagesperso-orange.fr/HTML/fichiers/Encodeur_INT_PPM_07.pde
Sinon, je travaille sur une version bcp plus évoluée équipée d'un clavier tactile, d'un émetteur type MODULE DHT TELEMETRIE et afficheur LCD.
A suivre donc...
A+
Frédéric
Site : http://fred.thorigny.pagesperso-orange.fr/
Galerie Flickr : http://www.flickr.com/photos/thorigny_frederic/
Site : http://fred.thorigny.pagesperso-orange.fr/
Galerie Flickr : http://www.flickr.com/photos/thorigny_frederic/
-
fredo5962 - Plus de 100 messages
- Messages: 153
- Inscription: Ven 03 Novembre 2006, 21:35
- Localisation: FERIN à proximité de DOUAI
Re: arduKap : kapduino le retour
![]() de jdc le Mar 28 Juin 2011, 21:39
de jdc le Mar 28 Juin 2011, 21:39
Salut Fred,
très chouette réalisation & l'utilisation d'un module emission rc est très ingénieuse.
A voir le code en détails
@+
jdc
très chouette réalisation & l'utilisation d'un module emission rc est très ingénieuse.
A voir le code en détails
@+
jdc
-

jdc - Plus de 400 messages
- Messages: 548
- Inscription: Lun 20 Juin 2005, 10:55
- Localisation: Strasbourg - FRANCE
Re: arduKap : kapduino le retour
![]() de deldude le Mer 29 Juin 2011, 9:10
de deldude le Mer 29 Juin 2011, 9:10
deldude a écrit:Bonjour à tous,
Il y a quelques temps, j'avais lancé l'idée d'utiliser arduino pour l'électronique de nos nacelles.
Certains d'entre vous sont d'ailleurs passés à l'acte avec visiblement un certain succès.
Et voila le schéma :

Et ce que cela pourrait donner en PCB simple face (d'ailleurs si vous avez dans vos connaissances quelqu'un qui a le matériel pour faire des circuits simple face, je suis preneur) :

La carte est là placée en longueur.
Sinon on peut utiliser une configuration en carré et ça donne ça :


C'est un premier jet (certainement maladroit : je découvre Eagle) mais ça peut être une bonne base.
PS : quelqu'un peut me confirmer comment sont cablés les servo : je suis parti du principe (signal,vcc,gnd) mais je me suis peut être trompé..
Bon vols et belles Photos
Jean-Christophe
Jean-Christophe
-
deldude - Plus de 100 messages
- Messages: 157
- Inscription: Ven 23 Juin 2006, 14:59
- Localisation: Maisons-Alfort
Re: arduKap : kapduino le retour
![]() de fxix le Mer 29 Juin 2011, 12:41
de fxix le Mer 29 Juin 2011, 12:41
deldude a écrit:
PS : quelqu'un peut me confirmer comment sont cablés les servo : je suis parti du principe (signal,vcc,gnd) mais je me suis peut être trompé..
C'est bien çà.
-
fxix - Plus de 1000 messages
- Messages: 1038
- Inscription: Dim 13 Avril 2008, 9:00
- Localisation: presque à Tours
Re: arduKap : kapduino le retour
![]() de J-C le Mer 29 Juin 2011, 12:46
de J-C le Mer 29 Juin 2011, 12:46
Normalement, pour les servos, le "+" est au milieu, la commande d'un côté et la masse de l'autre (sauf pour les vieux servo Sanwa). Comme ça, en cas de mauvais branchement, on évite de tout griller (a priori).
De plus je remercie fredo5962 pour le partage.
A+
JC
De plus je remercie fredo5962 pour le partage.
A+
JC
-
J-C - Plus de 1000 messages
- Messages: 1770
- Inscription: Jeu 15 Mai 2008, 9:14
- Localisation: Sud des Landes
Re: arduKap : kapduino le retour
![]() de Deltakap le Mer 06 Juillet 2011, 11:51
de Deltakap le Mer 06 Juillet 2011, 11:51
Jeff06 a écrit:Bonjour.
C'est passionnant, mais ... quand on n'y connait rien en électronique ?
Prévoyez-vous un petit guide "pas à pas", avec liste du matériel, schémas, et programmes ?
Ce serait une vraie aide !
Jeff.
Après avoir utilisé l'arduino micro 3.3v, je suis passé à l'arduino nano 5v sur shield I/O (de ce type là : http://cgi.ebay.fr/DFRobot-Nano-I-O-Shi ... 677wt_1139)
Gros avantages: branchement direct des servos et de la commande chdk du canon (cette fois-ci sans adaptation de tension), branchement direct de l'APC220 (les connecteurs sont prévus), le tout sans soudures.
Bon, ok, j'ai quand même sorti le fer à souder pour modifier le branchement de l'APC (utilisation des sorties 2 et 3 de l'arduino à la place des 0 et 1, associé à la librairie NewSoftSerial pour libérer le port com d'origine et pouvoir faire les mises à jour de l'arduino sur le port mini-usb sans démonter l'APC à chaque fois... si, c'est pénible pendant la phase de développement) mais cette manip était facultative, juste un peu plus confortable à l'usage.
Le câble d'alimentation, venant du chargeur solaire, a été soudé aussi sur la carte I/O. (pas indispensable non plus)
L'émetteur vidéo (5V) fonctionne sur la sortie 5v de la carte I/O... mais comme rien n'est parfait en ce monde, l'image n'était pas nickel et j'ai ajouté un régulateur 5V pour l'alimenter seul.
Petit point négatif, la dimension de la carte I/O: le boitier choisi pour la configuration arduino micro ne ferme plus
Sinon, je suis resté fidèle à l'option "passage en autokap" si pas de signal radio, quand j'ai la flemme de trimbaler la radiocommande.

Gilbert
Galerie Flickriver
Galerie Flickriver
-

Deltakap - Plus de 1000 messages
- Messages: 1432
- Inscription: Lun 22 Septembre 2008, 11:35
- Localisation: Du coté de Granville
Re: arduKap : kapduino le retour
![]() de J-C le Jeu 07 Juillet 2011, 17:49
de J-C le Jeu 07 Juillet 2011, 17:49
Salut Gilbert. As-tu un bout de code qui fonctionne pour faire communiquer 2 arduinos avec le kit de transmission que tu as (et que j'ai d'ailleurs) ? Comment commutes-tu entre mode manuel et auto ?
A+
JC
A+
JC
-
J-C - Plus de 1000 messages
- Messages: 1770
- Inscription: Jeu 15 Mai 2008, 9:14
- Localisation: Sud des Landes
Re: arduKap : kapduino le retour
![]() de Deltakap le Jeu 07 Juillet 2011, 22:01
de Deltakap le Jeu 07 Juillet 2011, 22:01
Bonsoir JC,
Pour l'instant je n'utilise pas du tout la fonction modem de l'APC (pas d'émission depuis la nacelle)
pour la nacelle, j'utilise donc une version simplifiée du sketch SerialCallResponse (sans le establishContact) et simplement des "print" coté radiocommande. Le codage est lui aussi simplifié à l'extrème: toutes les infos utiles sont codées sur un seul octet.... l'arduino coté nacelle n'a qu'un seul caractère (et non une chaine) à décoder.
Pour la commutation radio/autokap, j'utilise une variable globale (autokap=true/false) et une fonction delay perso qui permet d'appeler pendant le delay une fonction check_signal() qui vérifie qu'un caractère est reçu ou au contraire qu'aucun signal n'est reçu pendant 1 minutes.
Le code de la nacelle:
Le code de l'émetteur à suivre
Pour l'instant je n'utilise pas du tout la fonction modem de l'APC (pas d'émission depuis la nacelle)
pour la nacelle, j'utilise donc une version simplifiée du sketch SerialCallResponse (sans le establishContact) et simplement des "print" coté radiocommande. Le codage est lui aussi simplifié à l'extrème: toutes les infos utiles sont codées sur un seul octet.... l'arduino coté nacelle n'a qu'un seul caractère (et non une chaine) à décoder.
Pour la commutation radio/autokap, j'utilise une variable globale (autokap=true/false) et une fonction delay perso qui permet d'appeler pendant le delay une fonction check_signal() qui vérifie qu'un caractère est reçu ou au contraire qu'aucun signal n'est reçu pendant 1 minutes.
Le code de la nacelle:
- Code: Tout sélectionner
// Nacelle
#include <Servo.h>
#include <NewSoftSerial.h>
NewSoftSerial mySerial(3, 2);
#define PHOTOS_PAR_HEURE 600 // nb photos en 1h
#define POS_PER_TURN 10
#define NB_TILT_INCLIN 5 //nb inclinaisons
#define TILT_PIN 9
#define PAN_PIN 10
#define APN_PIN 13
#define TILT_INCLIN_1 0 //1ère inclinaison en degrés
#define TILT_INCLIN_2 22 //2ère inclinaison en degrés
#define TILT_INCLIN_3 45 //3ère inclinaison en degrés
#define TILT_INCLIN_4 67 //4ère inclinaison en degrés
#define TILT_INCLIN_5 90 //5ère inclinaison en degrés
#define TILT_HORIZON 131 // l'apn regarde l'horizon
#define TILT_BAS 43 // l'apn regarde en bas
#define PAN_IDLE 1517
#define PAN_SPEED 20
#define AUTOKAP_PAN_SPEED 1470
#define TURN_TIME 4035
const int SetAPCPin = 4; //pin4 de l'arduino reliée à la pin7 de l'APC (setting de l'APC)
int attente = 4000;
int tilt_position = 0;
Servo tilt_servo;
Servo pan_servo;
int firstSensor = 0; // first analog sensor
int secondSensor = 0; // second analog sensor
int thirdSensor = 0; // digital sensor
int inByte = 0; // incoming serial byte
byte trame[20];
int compteur=0;
boolean shoot_done=false;
byte rx_byte;
byte result_byte;
long timer=millis();
boolean autokap = true;
int angle_moy=0;
int angle=0;
void myDelay(long mytime=0) {
long mystart = millis();
while (millis()-mystart < mytime) {
check_signal();
if (!autokap) mytime=0;
}
}
void shoot(){
digitalWrite(APN_PIN, HIGH);
delay(100);
digitalWrite(APN_PIN, LOW);
if (!autokap) delay(100);
if (!autokap) shoot_done = true;
}
void tilt_angle(int angle = 0){
tilt_servo.attach(TILT_PIN);
angle = map(angle, 0, 90, TILT_HORIZON, TILT_BAS);
tilt_servo.write(angle);
myDelay(900); // mouvement (>700 ?)
shoot(); // 100ms + 900ms soit 1s
tilt_servo.detach();
myDelay(attente-1000);
}
void turn(int rotation=1){
pan_servo.write(AUTOKAP_PAN_SPEED);
pan_servo.attach(PAN_PIN);
myDelay(TURN_TIME/POS_PER_TURN);
pan_servo.detach();
}
void check_signal() {
if (mySerial.available()) {
inByte = mySerial.read();
rx_byte = (inByte>>6);
result_byte = inByte & B00111111;
if (rx_byte>0) autokap=false;
timer=millis();
} else {
if (!autokap) {
inByte = 0; rx_byte =0;
if (millis()-timer > 500) {tilt_servo.detach();}
if (millis()-timer > 5000) {pan_servo.detach();}
if (millis()-timer > 100) {shoot_done=false;}
if (millis()-timer > 60000) {autokap=true;}
}
}
}
void setup()
{
Serial.begin(9600);
mySerial.begin(9600);
attente = (3600000 / (PHOTOS_PAR_HEURE / NB_TILT_INCLIN / POS_PER_TURN ) - TURN_TIME) / NB_TILT_INCLIN / POS_PER_TURN ;
if ((attente-1000)<=0) attente = 1001;
pinMode(SetAPCPin, OUTPUT);
digitalWrite(SetAPCPin, HIGH);
}
void loop()
{
if (autokap) {
for(int n=1;n<=NB_TILT_INCLIN;n++){
//check_signal();
if (autokap)tilt_angle((n-1)*90/(NB_TILT_INCLIN-1));
}
if (autokap) turn();
}else{
check_signal();
if (rx_byte == 0) {
} else if (rx_byte == 1) {//byte1 - tilt
int angle = map(result_byte, 63, 0, TILT_HORIZON+10, TILT_BAS-10);
angle_moy = angle;//(2*angle_moy+angle)/3;
tilt_servo.attach(TILT_PIN);
tilt_servo.write(angle_moy);
} else if (rx_byte == 2) {
if (result_byte==0) {
pan_servo.detach();
}else if ((result_byte&B00000011)>0) {
pan_servo.attach(PAN_PIN);
if ((result_byte&B00000100)>>2) pan_servo.write(PAN_IDLE - PAN_SPEED*(result_byte&B00000011)^2);
else pan_servo.write(PAN_IDLE + PAN_SPEED*(result_byte&B00000011)^2);
}
} else if (rx_byte == 3) {
if (result_byte==B00001000 && !shoot_done) {
shoot();
shoot_done = true;
}
}
}
}
Le code de l'émetteur à suivre
Gilbert
Galerie Flickriver
Galerie Flickriver
-
Deltakap - Plus de 1000 messages
- Messages: 1432
- Inscription: Lun 22 Septembre 2008, 11:35
- Localisation: Du coté de Granville
Re: arduKap : kapduino le retour
![]() de Deltakap le Jeu 07 Juillet 2011, 22:25
de Deltakap le Jeu 07 Juillet 2011, 22:25
La suite.... le code coté émetteur (sans la gestion du stick gauche que je n'utilise pas pour l'instant, le déclenchement de la photo se faisant par un bouton poussoir, et de la sauvegarde de la calibration du stick droit en eeprom... pour que ça fasse moins de 5000 caractères sur le forum)
- Code: Tout sélectionner
// Radiocommande
#include <EEPROM.h>
#include <NewSoftSerial.h>
NewSoftSerial mySerial(3, 2);
const int analogInPinRV = A2; // Analog input pin that the potentiometer is attached to
const int analogInPinRH = A1;
const int buttonPin = 5; // the number of the pushbutton pin
const int ledPin = 9; // the number of the LED pin
const int SetAPCPin = 4;
//(....)
int sensorValueRV = 0; // value read from the pot
int outputValueRV = 0;
int mRV=0;
int sensorMinRV = 1023; // minimum sensor value
int sensorMaxRV = 0; // maximum sensor value
int sensorValueRH = 0; // value read from the pot
int outputValueRH = 0;
int mRH=0;
int sensorMinRH = 1023; // minimum sensor value
int sensorMaxRH = 0; // maximum sensor value
int envoiRV = 0;
int envoiRH = 0;
int pan=0;
byte shoot=0;
byte inByte;
byte byte1;
byte byte2;
byte byte3;
byte send1;
byte send2;
byte send3;
boolean ShootDone = false;
byte autokap=0;
int ledState = HIGH; // the current state of the output pin
int buttonState; // the current reading from the input pin
int lastButtonState = LOW; // the previous reading from the input pin
long lastDebounceTime = 0; // the last time the output pin was toggled
long debounceDelay = 50; // the debounce time; increase if the output flickers
void button(){
int reading = digitalRead(buttonPin);
if (reading != lastButtonState) {
// reset the debouncing timer
lastDebounceTime = millis();
}
if ((millis() - lastDebounceTime) > debounceDelay) {
// whatever the reading is at, it's been there for longer
// than the debounce delay, so take it as the actual current state:
buttonState = reading;
}
// set the LED using the state of the button:
digitalWrite(ledPin, buttonState);
lastButtonState = reading;
}
void setup() {
Serial.begin(9600);
mySerial.begin(9600);
pinMode(buttonPin, OUTPUT);
digitalWrite(buttonPin, HIGH);
pinMode(buttonPin, INPUT);
pinMode(ledPin, OUTPUT);
pinMode(SetAPCPin, OUTPUT);
digitalWrite(SetAPCPin, HIGH);
if (!digitalRead(buttonPin)) calib();
//(....)
sensorMaxRV = EEPROMReadInt(8);//672;--------647
sensorMinRV = EEPROMReadInt(10);//438;-------373
sensorMaxRH = EEPROMReadInt(12);//973;
sensorMinRH = EEPROMReadInt(14);//732;
}
void loop() {
button();
//(....)
sensorValueRV = analogRead(analogInPinRV);
outputValueRV = map(sensorValueRV, sensorMaxRV, sensorMinRV, 0, 63);
outputValueRV = constrain(outputValueRV, 0, 63);
mRV=(2*mRV+outputValueRV)/3;
outputValueRV = mRV;
sensorValueRH = analogRead(analogInPinRH);
mRH=(2*mRH+sensorValueRH)/3;
sensorValueRH = mRH;
outputValueRH = map(sensorValueRH, sensorMaxRH, sensorMinRH, 0, 255);
outputValueRH = constrain(outputValueRH, 0, 255);
//Panoramique
if (outputValueRH<128-90) pan=B00000011;//3
else if (outputValueRH<128-60) pan=B00000010;//2
else if (outputValueRH<128-30) pan=B00000001;//1
else if (outputValueRH>128+90) pan=B00000111;//7
else if (outputValueRH>128+60) pan=B00000110;//6
else if (outputValueRH>128+30) pan=B00000101;//5
else pan=B00000000;
if (!buttonState) shoot=B00001000;//8
else shoot=0;
//codage
byte1 = B01000000 + outputValueRV; //tilt
byte2 = B10000000 + pan;
byte3 = B11000000 + shoot;// + autokap;
if (byte1 != send1) {
send1=byte1;
mySerial.print(byte1,BYTE);
delay(20);
}
if (byte2 != send2) {
send2=byte2;
mySerial.print(byte2,BYTE);
delay(20);
}
if (byte3 != send3) {
send3=byte3;
mySerial.print(byte3,BYTE);
delay(20);
}
}
void calib() {
for (int n=0;n<10;n++){
digitalWrite(ledPin, LOW);
delay(50);
digitalWrite(ledPin, HIGH);
delay(50);
}
// calibrate during the first 15 seconds
while (millis() < 15000) {
//(....)
sensorValueRV = analogRead(analogInPinRV);
sensorValueRH = analogRead(analogInPinRH);
// record the maximum sensor value
//(....)
if (sensorValueRV >= sensorMaxRV) sensorMaxRV = sensorValueRV;
if (sensorValueRH >= sensorMaxRH) sensorMaxRH = sensorValueRH;
// record the minimum sensor value
//(....)
if (sensorValueRV <= sensorMinRV) sensorMinRV = sensorValueRV;
if (sensorValueRH <= sensorMinRH) sensorMinRH = sensorValueRH;
}
// signal the end of the calibration period
digitalWrite(ledPin, LOW);
}
//(....)
Gilbert
Galerie Flickriver
Galerie Flickriver
-
Deltakap - Plus de 1000 messages
- Messages: 1432
- Inscription: Lun 22 Septembre 2008, 11:35
- Localisation: Du coté de Granville
Re: arduKap : kapduino le retour
![]() de plesage le Ven 08 Juillet 2011, 6:56
de plesage le Ven 08 Juillet 2011, 6:56
Là, les mecs je dis chapeau bas, je suis un peu hermétique aux lignes de codes... j'ai pas tout compris(et je ne pense pas être le seul) mais ça fait des sujets de discussions sympa dans les conviviales....non sans déconner, je salue vos recherches et le fait que vous les partagiez...
Pierre Lesage - pierre@pierre-lesage.com
Pages Flickr : http://www.flickr.com/photos/tahitipix/ - What's App : (+33)06 78 19 94 10
Pages Flickr : http://www.flickr.com/photos/tahitipix/ - What's App : (+33)06 78 19 94 10
-

plesage - Plus de 1000 messages
- Messages: 2424
- Inscription: Sam 19 Novembre 2005, 16:37
- Localisation: Tahiti, French Polynesia
Re: arduKap : kapduino le retour
![]() de J-C le Ven 08 Juillet 2011, 8:39
de J-C le Ven 08 Juillet 2011, 8:39
Excellent !
Je ne garantie pas de pouvoir tester ça cet été, mais je vais "décortiquer" le code pour comprendre... Après, je verrai comment adapter ça pour ma MiniKap.
En tous les cas, pas c.. de changer les pins serial de l'APC, car c'est vraiment ch... euh ... pénible en phase de test. En plus tu peux monitorer au fur et à mesure.
Merci Gilbert
A+
JC
Je ne garantie pas de pouvoir tester ça cet été, mais je vais "décortiquer" le code pour comprendre... Après, je verrai comment adapter ça pour ma MiniKap.
En tous les cas, pas c.. de changer les pins serial de l'APC, car c'est vraiment ch... euh ... pénible en phase de test. En plus tu peux monitorer au fur et à mesure.
Merci Gilbert
A+
JC
-
J-C - Plus de 1000 messages
- Messages: 1770
- Inscription: Jeu 15 Mai 2008, 9:14
- Localisation: Sud des Landes
Re: arduKap : kapduino le retour
![]() de Deltakap le Ven 08 Juillet 2011, 9:22
de Deltakap le Ven 08 Juillet 2011, 9:22
plesage a écrit:Là, les mecs je dis chapeau bas, je suis un peu hermétique aux lignes de codes... j'ai pas tout compris(et je ne pense pas être le seul) mais ça fait des sujets de discussions sympa dans les conviviales....non sans déconner, je salue vos recherches et le fait que vous les partagiez...
Bonjour Pierre et merci
Je suis bien d'accord avec toi que de balancer en vrac des lignes de code n'a qu'assez peu d'intérêt pour la plupart des visiteurs du forum et qu'à part JC et peut être Philippe, personne ne lira ces lignes (j'ai hésité à répondre par mail à JC).
Aucune importance dans le fond... Le kap offre un champ d'expérimentation quasi infini, ces bidouillages en font partie. Et si ça permet à certains de se dire "ok, c'est trop compliqué, c'est pas pour moi, même pas la peine d'essayer" et à d'autres "ah bin en fait c'est tout c*n".... ça n'aura pas servi à rien. L'idée est simplement de dire "c'est possible". Et puis peut-être que certains trouveront dans ces lignes des idées ou des bouts de code à piquer pour leur propre projet (ce que je fais moi même
Finalement, c'est un peu comme le chdk, plutôt hermétique au premier abord (et au second) mais quand on a saisi l'intérêt du truc, ça peut valoir le coup d'y passer "un peu" de temps.
Après, à quoi ça sert de s'emm*rder avec ça quand on peut faire les mêmes photos avec un élastique et 2 chewing-gums... bah, justement le plaisir de s'emm*rder
Mais je sais que tu n'es pas le dernier à expérimenter et expérimenter encore, en espérant comme nous tous que la configuration idéale n'existe pas
Les seuls intérêts que je vois à l'Arduino, c'est le coté abordable pour la plupart, financièrement et même techniquement, et surtout le coté évolutif du bazar au gré des idées et des besoins, le fonctionnement de la nacelle ne dépendant que du code qu'on a placé soi-même dedans.
J-C a écrit:En tous les cas, pas c.. de changer les pins serial de l'APC, car c'est vraiment ch... euh ... pénible en phase de test. En plus tu peux monitorer au fur et à mesure.
Bonjour JC,
Oui, et c'est "rien" à faire, juste enlever les deux staps (cavaliers) et souder les deux fils qui vont bien. J'ai aussi branché la pin7 de l'APC sur la pin4 de l'arduino pour pouvoir changer le setting de l'APC sur le terrain (bon ok, je n'utilise pas encore cette possibilité).
Quelque chose comme ça avec la réponse sur le PC:
- Code: Tout sélectionner
#include <NewSoftSerial.h>
NewSoftSerial mySerial(3, 2);
const int SetAPCPin = 4;
void setup()
{
Serial.begin(9600);
mySerial.begin(9600);
pinMode(SetAPCPin, OUTPUT);
digitalWrite(SetAPCPin, LOW); //set parameters
}
void loop()
{
//mySerial.println("RD"); // lecture config
mySerial.println("WR 475000 1 9 3 0"); //écriture config
while (mySerial.available())
{
char cmdChar = mySerial.read ();
Serial.print(cmdChar);
}
delay(20000);
}
Gilbert
Galerie Flickriver
Galerie Flickriver
-
Deltakap - Plus de 1000 messages
- Messages: 1432
- Inscription: Lun 22 Septembre 2008, 11:35
- Localisation: Du coté de Granville
Re: arduKap : kapduino le retour
![]() de Emmanuel le Ven 08 Juillet 2011, 12:54
de Emmanuel le Ven 08 Juillet 2011, 12:54
Bon, Ok, moi, je n'y comprend et je n'ai pas le temps de chercher à comprendre. Pourtant je dis "Bravo".
Et même si cela ne devient qu'un dialogue entre 2 passionnés ; CONTINUEZ les gars. Ce forum, je l'ai justement créé pour cela.
NB : J'y pige que couic, mais je trouve cela super !
Et même si cela ne devient qu'un dialogue entre 2 passionnés ; CONTINUEZ les gars. Ce forum, je l'ai justement créé pour cela.
NB : J'y pige que couic, mais je trouve cela super !
Emmanuel, Administrateur des forums francophones de la photographie aérienne par cerf-volant : http://photocerfvolant.free.fr/phpBB2/ - Et "toujours..." mon projet "au long cours..."
-

Emmanuel - Site Admin
- Messages: 8652
- Inscription: Dim 21 Novembre 2004, 3:23
- Localisation: Saint Jean Les Deux Jumeaux (Seine et Marne) 77
Re: arduKap : kapduino le retour
![]() de Alankap le Ven 08 Juillet 2011, 14:23
de Alankap le Ven 08 Juillet 2011, 14:23
Bravo les gars !
Ce forum est d'une richesse formidable....
Petite question comment débuter facilement avec l'arduino, j'ai vu qu'il existait des kits...mais lequel choisir pour débuter ? (j'ai quelques notions d'électroniques quand même)
du style ça:
http://www.robotshop.com/eu/kit-pour-debutant-arduino-flex-un.html
ou
http://www.zartronic.fr/kit-workshop-arduino-sans-carte-p-17.html
qu'en pensez vous ? ?
Ce forum est d'une richesse formidable....
Petite question comment débuter facilement avec l'arduino, j'ai vu qu'il existait des kits...mais lequel choisir pour débuter ? (j'ai quelques notions d'électroniques quand même)
du style ça:
http://www.robotshop.com/eu/kit-pour-debutant-arduino-flex-un.html
ou
http://www.zartronic.fr/kit-workshop-arduino-sans-carte-p-17.html
qu'en pensez vous ? ?
-

Alankap - Plus de 1000 messages
- Messages: 2499
- Inscription: Mar 06 Novembre 2007, 14:33
Re: arduKap : kapduino le retour
![]() de Deltakap le Ven 08 Juillet 2011, 15:46
de Deltakap le Ven 08 Juillet 2011, 15:46
Alankap a écrit:Petite question comment débuter facilement avec l'arduino, j'ai vu qu'il existait des kits...mais lequel choisir pour débuter ?
Bonjour Alain,
Aie, demander à un Normand de faire des choix
En gros, première étape, le format de la carte arduino: http://arduino.cc/en/Main/Hardware
- L'Arduino Uno est le plus adapté à la bidouille hors kap puisqu'on peut lui ajouter des tas de shields (ou circuits imprimés supplémentaires avec des fonctions aussi diverses que variées)... et ça se monte comme un lego.
Il existe aussi un Arduino Duemilanove (http://www.arduino.cc/en/Main/ArduinoBoardDuemilanove) c'est la version précédente du l'arduino uno.

Il existe aussi une version spéciale (roboduino) qui offre les connecteurs pour brancher directement les servos (sans ajouter de shield I/O) mais qui ne permet plus cet empilage de shields.
- L'Arduino Micro est un excellent candidat pour le kap, c'est la plus petite carte mais avec la quasi obligation de la monter sur un circuit imprimé (à developper soi-même) pour y brancher servos et autres connecteurs de déclencheur d'apn. La programmation se fait via une mini carte d'interface usb qui peut être enlevée quand le developpement soft est ok.
- L'Arduino nano a le port usb intégré mais aussi un shield I/O tout prêt et en vente libre pour y brancher directement les servos (c'est la solution que j'ai adopté après avoir essayé l'arduino Micro, une solution très proche finalement de la carte roboduino sauf que je peux y brancher directement le modem APC200, l'emplacement étant prévu sur la carte I/O)
deuxième étape, le choix du processeur (Atmel ATmega168 ou ATmega328): Là c'est facile... ATmega328 (même si les cartes à base de 168 sont un peu moins chères). Il existe aussi des cartes avec Atmega1280 ou 2560, inutiles pour ce qu'on fait.
Troisième étape, le choix de la tension.... 3.3V ou 5V... en 3.3V, on est sur que le régulateur de tension fonctionne correctement si l'arduino est alimenté avec 4 batteries 1.2V (mais ça ne déclenchait pas mon canon par exemple d'où l'ajout de résistances et autres transistors... c'est chi*nt). En 5V, la régulation ne marche plus sous 4.8V (mais l'arduino oui). Les sorties sont en 5V au lieu de 3.3V.
(Mon arduino nano est un 5V alimenté avec un chargeur solaire qui sort du 5.5V)
Pour les kits de démarrage que tu mentionnes, ils me paraissent assez peu adapté pour le kap (plein de capteurs plus ou moins inutiles pour le premier lien, pas d'arduino pour le deuxième
Après, il faut télécharger l'environnement de développement gratuit (http://arduino.cc/en/Main/Software), se lancer dans la programmation (proche du language C) et charger le code sur l'arduino via un bête port usb. Il y a des tas d'exemples de programmes livrés avec, et évidemment par ci par là sur le web.
Gilbert
Galerie Flickriver
Galerie Flickriver
-
Deltakap - Plus de 1000 messages
- Messages: 1432
- Inscription: Lun 22 Septembre 2008, 11:35
- Localisation: Du coté de Granville
Re: arduKap : kapduino le retour
![]() de André le Ven 08 Juillet 2011, 18:35
de André le Ven 08 Juillet 2011, 18:35
Comme Pierre et Emmanuel : j'y comprends rien du tout mais je suis admiratif ( si, si ! ).
En tous les cas, vous avez l'air de bien vous amuser.
Quelqu'un pourrait-il me faire un résumé non pas de comment ça fonctionne ( ce serait peine perdue ) mais de ce à quoi ça va servir exactement ?
) mais de ce à quoi ça va servir exactement ?
En tous les cas, vous avez l'air de bien vous amuser.
Quelqu'un pourrait-il me faire un résumé non pas de comment ça fonctionne ( ce serait peine perdue
André
Ma galerie flickr : http://www.flickr.com/photos/dd-29/
Mon blog : http://kapouest.over-blog.com/
ou : http://kap-ouest.eklablog.com/
Ma galerie flickr : http://www.flickr.com/photos/dd-29/
Mon blog : http://kapouest.over-blog.com/
ou : http://kap-ouest.eklablog.com/
-
André - Plus de 8000 messages
- Messages: 9269
- Inscription: Dim 21 Septembre 2008, 17:02
- Localisation: Au nord de Brest même
Re: arduKap : kapduino le retour
![]() de Deltakap le Ven 08 Juillet 2011, 19:17
de Deltakap le Ven 08 Juillet 2011, 19:17
André a écrit:...mais de ce à quoi ça va servir exactement ?
Bonsoir André,
Dans sa version actuelle, ma nacelle fonctionne à la mise en marche en autokap. Si j'allume la radiocommande (qui fonctionne maintenant avec une antenne de 3 ou 4 cm) la nacelle passe sous le contrôle des manettes (et d'un bouton poussoir pour prendre la photo).
Je peux à tout moment éteindre la radiocommande (pour économiser de la batterie, ou si il n'y a plus de batteries) et la nacelle repasse en autokap après une minute. Si je rallume la radiocommande de nouveau (ouais, je n'ai qu'à savoir ce que je veux
Ça sert à quoi ? bah, à faire des photos quand même (en autokap) si j'oublie la radiocommande, si j'ai oublié de recharger les batteries , si je préfère me balader sans la télécommande, si je discute un moment avec quelqu'un ou si le cerf-volant a décidé de faire des siennes et de retenir toute l'attention (au point d'oublier de prendre les photos, si, si, c'est du vécu
A ma connaissance, aucun système commercial (peut-être le camremote bientôt) ne propose ce mode de fonctionnement (c'est une idée géniale de Michel)
On peut imaginer aussi à partir de ce genre de configuration matérielle d'ajouter des capteurs comme par exemple un altimètre et afficher au sol l'altitude de la nacelle (comme le propose Deldude), commander depuis le sol l'allumage ou non de l’émetteur vidéo, changer de canal vidéo depuis la radiocommande, recalibrer les positions du tilt ou les positions des sticks, etc, etc, etc.... la limite étant l'imagination
En fait, c'est juste un système totalement paramétrable puisque entièrement programmable (mais entièrement à programmer)
Gilbert
Galerie Flickriver
Galerie Flickriver
-
Deltakap - Plus de 1000 messages
- Messages: 1432
- Inscription: Lun 22 Septembre 2008, 11:35
- Localisation: Du coté de Granville
57 messages • Page 1 sur 2 • 1, 2
Retourner vers L'électronique embarquée et au sol
Qui est en ligne
Utilisateurs parcourant ce forum: Aucun utilisateur enregistré et 50 invités