becotus a écrit:Y a-t-il une fonction qu'il pourrait faire plus facilement qu'un Arduino, ou qui ne serait pas possible à un Arduino?
Oui, il est fait pour manipuler les servos, donc, son interface permet, à l'aide de curseurs manipulés à la souris, de faire bouger les servos, et d'enregistrer des enchainements. Avec l'arduino on est obligé de programmer.
becotus a écrit:La programmation est-elle en fin de compte plus ou moins aisée?
Aïe ... réponse de Normand : personnellement je trouve moins aisée le langage de script du maestro vis à vis du langage beaucoup plus évolué et logique de l'arduino... MAIS ... je pratique quotidiennement dans mon boulot des langages proches de l'arduino donc c'est peut être juste une question d'habitude ou de goût. Par contre je pense qu'on est plus rapidement limité avec le Maestro (nombre de lignes de script limité, nombre de sous routines limité, nombre de chiffre dans la 'pile' limité ....)
André a écrit:Plusieurs questions :
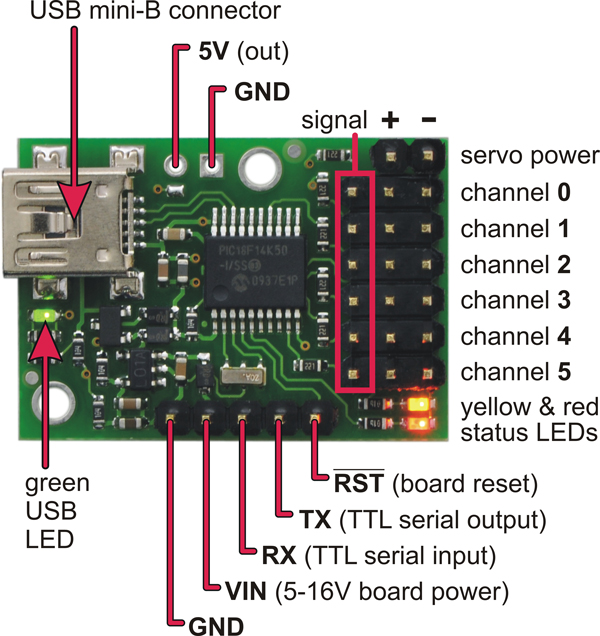
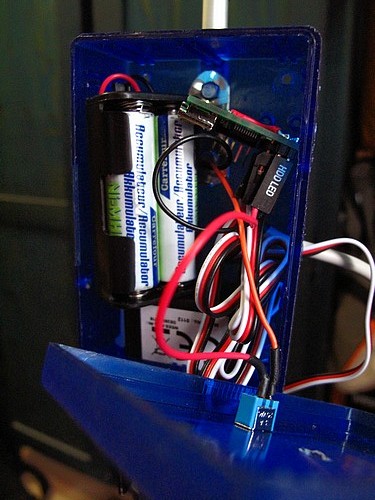
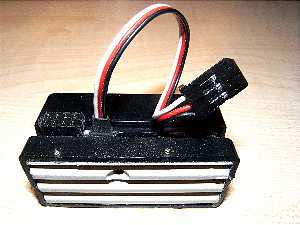
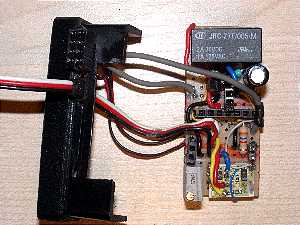
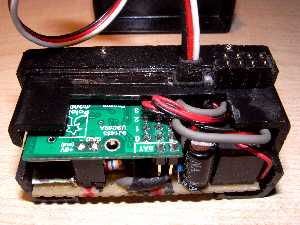
-> c'est quoi exactement un circuit SetUp ?Un petit circuit convertisseur DC/DC qui élève les 3V des deux AA à 5V.
-> tu as un montage "servo en tête" : tu l'as renforcé ?Absolument pas
 -> qu'est-ce que ton "petit maestro" fait faire à ta nacelle ?
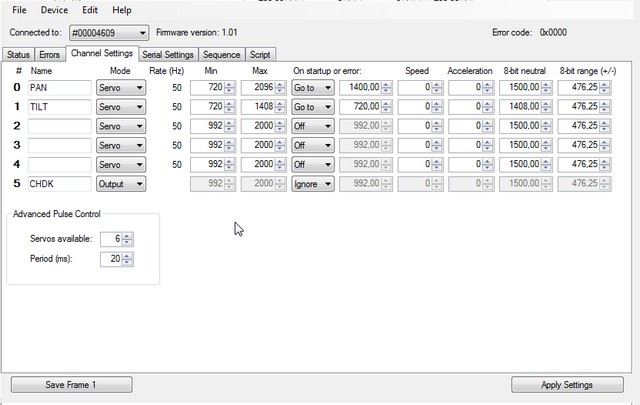
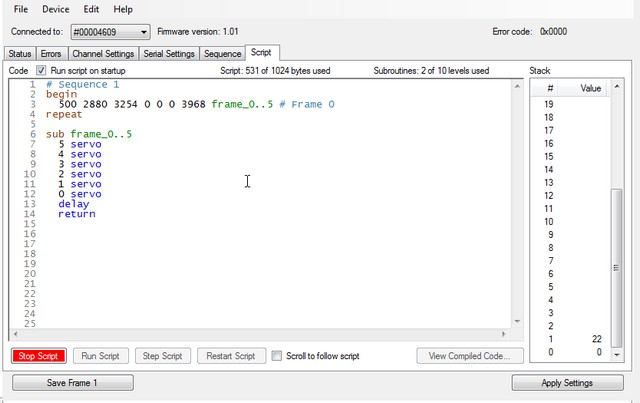
-> qu'est-ce que ton "petit maestro" fait faire à ta nacelle ?Pour l'instant voici le script (demain je vous posterais le script dans son langage naturel pour que vous voyez, mais là je ne suis pas sur mon Pc) :
- attente 3 minutes
- servo de Tilt au 1er angle
- 8 angles de PAN avec à chaque fois une impulsion de 800ms sur la sortie servo 6 où j'ai mis mon cable usb vers le S95 chdkisé
- servo de Tilt au 2nd angle
- 8 angles de PAN avec à chaque fois une impulsion de 800ms sur la sortie servo 6 où j'ai mis mon cable usb vers le S95 chdkisé
- servo de Tilt à l'horizontale (photo "archéo")
- Shoot (impulsion de 800ms sur la sortie servo 6)
- Zoom In (impulsion de 250ms sur la sortie servo 6)
- On recommence au tilt 1er angle
- ad lib
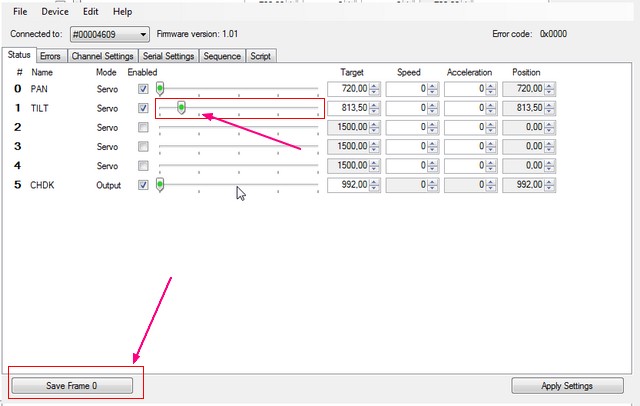
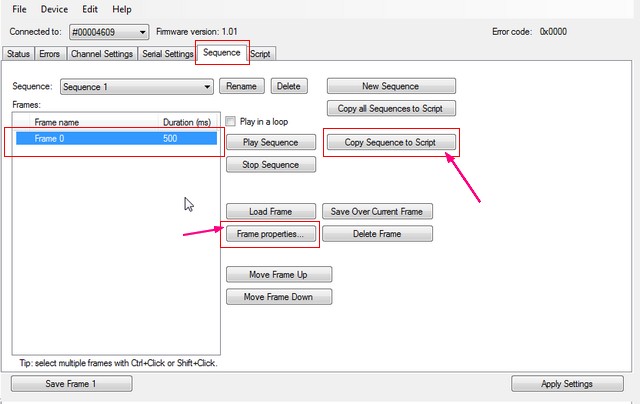
-> pour la programmation de ce machin, c'est simple ou pas ?Si on reste dans l'enregistrement pas à pas de mouvement de servo c'est hyper simple : tu bouge un curseur, tu capture, tu bouge un curseur, tu capture, etc ...
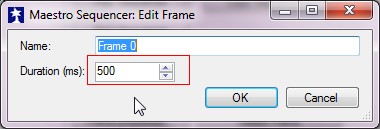
Par contre c'est très long comme méthode car il faut décrire tout pas à pas. Par exemple, pour faire une impulsion de 800ms sur la sortie 6, il faut faire : servo 6 à 0 ; capture ; servo 6 à 100% (5 volts) ; capture ; servo 6 à 0 ; capture puis aller sur l'étape où la sortie est à 100% pour régler sa tempo à 800ms (au lieu de 500ms par défaut à chaque étape).
Ce que j'ai fait, c'est que j'ai commencé comme ça, puis j'ai converti toutes mes étapes en script (l'outil le permet), et là j'ai pu bricoler directement dans le script (genre faire des copier-coller pour les choses qui se répètent, où une sous routine 'shoot' et 'zoom') ... je vous posterais le script demain pour que vous vous rendiez compte.
-> tu dis que le Pololu ne gère pas les servos à rotation continue "nativement" mais il peux le faire quand même non ?Oui tu peux le faire : si l'impulsion 'IDLE' (=servo arrêté) est à 1500ms, tu bouge le curseur à 1600ms pour aller dans un sens, et à 1400ms pour aller dans l'autre, puis tu mets une tempo (genre 700ms), et tu remet le curseur à 1500ms ce qui arrêtera le servo... c'est pas sexy mais ça marche.
Tiens juste un lien vers la page du site de Yury, où il montre ses nacelles et explique sa démarche et ses expérimentations :
http://kitepix.ca/?page_id=146Quand on voit le résultat obtenu... ça fait rêver

Merci pour le lien, ça va encore me donner des idées (et des sueurs froides à mon banquier

).