Comme
pour le reste du matériel, les options que j'ai choisies sont
le fruit de l'usage particulier que j'ai en photographie aérienne
par cerf-volant et, bien sûr, de l'état de mes connaissances
en la matière.
Je rappelle rapidement ici les contraintes que je me suis fixé
au départ. Il s'agissait de réaliser un système
me permettant la plus grande autonomie lors de voyages d'une
durée de plusieurs semaines. Autonomie de prises de vue d'une
part, autonomie logistique d'autre part car nous organisons nos voyages
nous même. Ils sont basés sur la découverte au plus
près de la vie des habitants, loin des hôtels / bunkers
remplis d'Européens sans lien avec les autochtones. Ajoutez
à ceci que nous privilégions les transports locaux et
la marche à pieds. Nous devons donc faire léger,
car nous ne bénéficions pas d'autre moyens de portage
que nos sacs au dos. Or, ceux-ci sont déjà bien garnis
avec le matériel de photo habituel.
Ceci implique donc une relative simplicité des choix
et technologies mis en oeuvre pour des questions évidentes
de légèreté et afin de pouvoir éventuellement
réparer avec les moyens du bord en cas de problème.
Enfin, ne connaissant pas à l'avance les conditions de vent
que je trouverai sur place, j'ai dû penser un système modulaire
et compact, à la fois dans les tailles de CV et pour les
nacelles qui doivent recevoir plusieurs type d'appareils photo (un
compact léger et un panoramique).
Après avoir collecté une conséquente documentation
sur le Net, j'ai abandonné le shéma traditionnel du
"double U" (jugé trop encombrant) pour celui, correspondant
plus à mes besoins, d'une nacelle bâtie à l'aide d'un
ensemble d'équerres en aluminium. Mais tout choix implique
des contraintes spécifiques et celui-ci requiert sûrement
plus de rigueur dans la détermination des points d'équilibre
qu'avec le système du "double U".
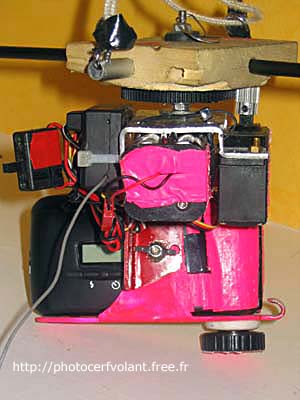
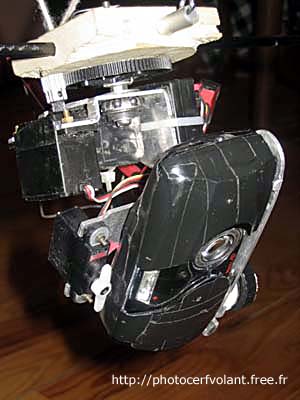
Voici des scans directs (ce qui explique parfois de légères
anamorphoses) sous tous les cotés de ma seconde nacelle.
Je l'ai utilisée montée sur un pendule. Très
rapide à mettre en oeuvre sur le terrain mais un peu trop sujette
aux balancements dans le sens de la ligne de retenue du cerf-volant.
Je l'ai abandonnée pour une fixation Picavet beaucoup plus
stable mais, hélas, bien plus longue à fixer sur la
ligne.
Avant tout, cette nacelle modulaire a été pensée
pour accueillir indifférement soit un compact argentique Olympus
Mju II (Stylus Epic), soit un appareil panoramique Soviétique
de marque Horizon (galerie
photos panoramique) donnant des négatifs de 24x56 mm. Rien
n'étant commun entre ces deux caméras (dimensions, poids,
position du déclencheur, etc...) il a fallu cogiter sérieusement
pour obtenir le résultat que voici.
Il s'agit d'une nacelle a deux servos, un pour le déclenchement,
un pour la rotation panoramique de l'ensemble. Le berceau supportant
l'appareil permet un cadrage soit horizontal, soit vertical, mais
ce choix n'est pas controlé à distance. Il suffit de
redescendre l'appareil pour changer cette orientation manuellement,
ce qui n'est pas trop pénalisant. De même, le règlage
de l'inclinaison (angle vertical de prise de vue par rapport à
l'horizon, en anglais tilt) est manuel. Il est choisi avant
le lancement de la nacelle en fonction de l'angle (plus ou moins prononcé)
décrit par la ligne du cerf-volant. L'option d'un troisième
servo n'a pas été retenue pour 2 raisons principales.
En premier lieu pour respecter la volonté d'obtenir une nacelle
la plus légère possible, or un servo Futaba S3003 pèse
35 grammes à lui seul. En second lieu, pour une question de
risque, car la conception "en équerre" de cette nacelle induit
un porte-à-faux au point de jonction entre la partie reliée
au Picavet et l'équerre mobile soutenant le berceau portant
l'appareil.
Le poids de cette nacelle en fonctionnement avoisinait les 700 grammes,
ce qui compte tenu de la modularité de l'ensemble n'était
déjà pas si mal...